使用手册 - 双雷达标定手册:修订间差异
小无编辑摘要 |
无编辑摘要 |
||
| 第2行: | 第2行: | ||
本手册使用于多个雷达,手册中是双3d雷达标定,2d雷达标定方式也一致 | 本手册使用于多个雷达,手册中是双3d雷达标定,2d雷达标定方式也一致 | ||
(有个更好的文档:[[标定双激光雷达外参]]) | |||
2024年10月16日 (三) 17:15的最新版本
双雷达标定手册
本手册使用于多个雷达,手册中是双3d雷达标定,2d雷达标定方式也一致
(有个更好的文档:标定双激光雷达外参)
1.准备工作 1.Detour中添加双雷达,并且都可以看到正确的点云
1)打开车体编辑器-添加3D激光雷达

2)添加后鼠标把雷达放置到大概位于车体方向的位置,然后选中雷达,填写雷达名称,这个名称需要和Medulla中添加的雷达名称一致,设置好后点击-动作 ,双击捕捉即可看到该雷达点云。


3)添加二向化3D雷达,选中雷达,设置使用3D雷达的名称”lidar3dName”修改成刚才添加的3D雷达名称即可,此处是backlidar3d,然后再把这个二向化雷达的名称改成backlidar,再去动作里面,双击捕捉即可看到二向化后的雷达数据



4)Detour目录下detour.json文件夹打开,把useTC改成true,保存重启Detour

5)找一个标定物最好是直角板,放在2个雷达交叉视野中,保证2个雷达都可以看到此参照物,如下图


2.标定 以上准备工作都完成后,开始建图工作(执行此步骤之前请先看文末的“建图中的问题”)
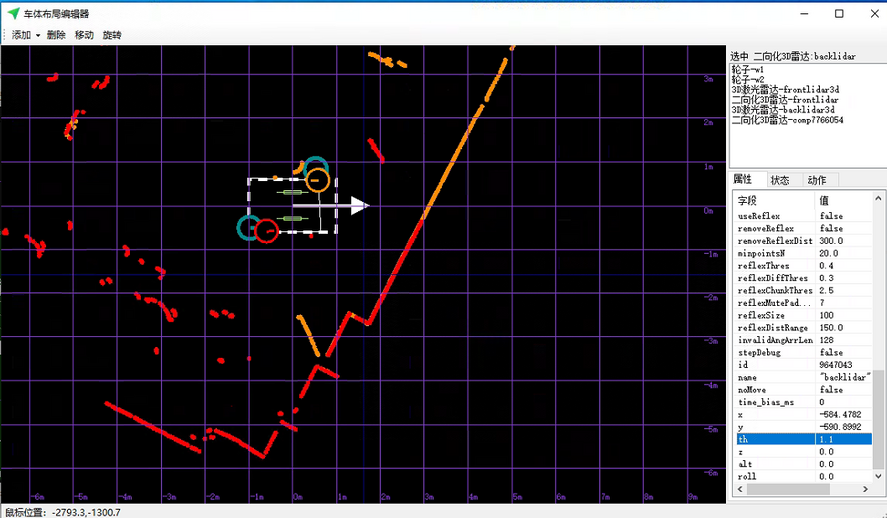
1.打开Detour.exe,打开车体编辑器,可以看到2个雷达的点云,目标就是把2个雷达的点云重叠在一起就完成工作了,我们首先需要保证前雷达的标定准确,这个可以看雷达xy标定教程,再此基础下标定第二个雷达,只需要修改第二个雷达的xyth即可,

2.要求是修改第二个雷达的xyth 保证2个点云完全重合,如下图,即可保存导航配置

3.添加第二个雷达的激光里程计,如下图

4.修改lidar名称为第二个雷达的名称backldiar,然后点击启动里程计

5.启动里程计后可以看到2个雷达的点云,然后保存导航配置,记得useTC一定要改成true!

6.点击里程计,看下2个雷达耦合误差是否正常(需要清除图层的情况下),看耦合误差,一般5mm以内都比较正常,若比较大检测雷达标定,如果原地旋转的时候出现较大例如10-30都可以,因为2个雷达数据的时间存在耦合误差,旋转速度不能太快问题就不大。

3.标定中的问题
1.如果2个雷达点云一直无法标定融合在一起;2.对于3d雷达检测雷达的minVStruct是否一致,这个参数是二向化3D雷达后的数据是从Z轴的哪个高度开始取的,用于过滤低矮变动较大的点云高度。
3.其次检车标定参照物是否垂直于地面
4.检查2个雷达安装高度是否水平

附件:标定纸
